| 所属类型: | 伺服电机 |
| 品 牌: | 松下 |
| 产 地: | 珠海 |
| 状 态: | 在产 |
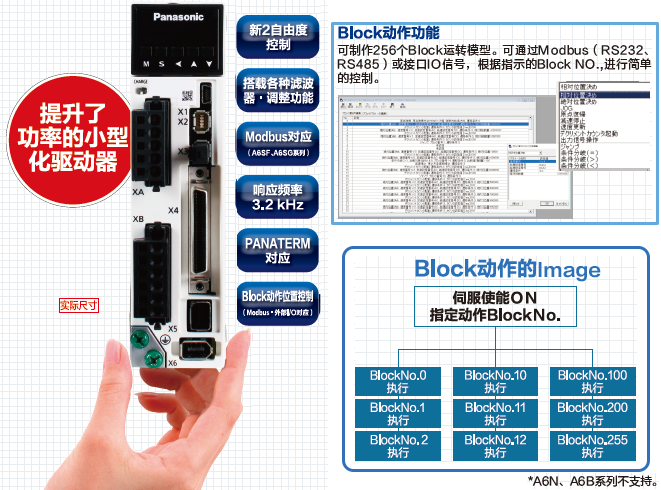
| 特 点: | 更快速、更智能、使用更简单的升级。提升了功率小型化驱动器 |
更快速、更智能、使用更简单的升级。提升了功率小型化驱动器。
|
 |  |  |  |  |  ※1 ※1 |  ※2 ※2 |  |
| ※1 | A6SF系列 |
|---|---|
| ※2 | A6SE、A6SG系列 |
适用CE、UKCA、UL/U-CL、TUV、KoreanKC。
 |
实现了极速正确动作的, 高速响应・高精度定位。
通过CPU等硬件的更新以及搭载了当社特定开发的新型算法,实现了更高速的响应性。同时,可自动去除根据共振产生的微振动、根据机械的摇动产生的振动等,实现了高精度的定位。 | 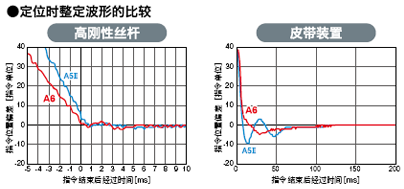 |
 |
通过简单的快速设定、整定时间与以前相比减少约64%<sup>※1</sup>。
通过新升级了的适合增益,大幅度缩短了调整时间。可自动设定・调整自适应陷波滤波器功能及各种增益。 ※1 与本公司以前产品A5Ⅱ家族相比较。 |  |
 |
提高生产性,实现响应频率3.2 kHz。
实现响应频率3.2 kHz。通过实现与以前机种相比139 %的提升※1,达到更高速动作,提高生产性。 |  |
寿命诊断 劣化诊断
发出电机、驱动器的寿命和装置的劣化界限的警告。 |
负载变动抑制控制
根据工件的载重变化等相应的惯量也会变动,本功能可自动设定最适合的增益表。通过此方法,机械设备的动作可达到稳定状态。 | 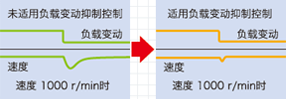 |
摩擦转矩补偿功能
为降低机械类摩擦的影响而提高响应性的功能。通常补偿一定动作的零漂转矩为偏载重补偿,可根据动作的方向设定动摩擦补偿,根据指令速度变化设定粘性摩擦补偿。 |
自动/手动 制振滤波器
搭载了通过安装支援软件自动设定制振滤波器的功能。制振滤波器根据指令输入去除固有的振动频率,可大幅降低停止时轴的摆动。 制振滤波器同时使用时,由以往机种的2个变更为3个(2自由度控制模式有效时由以往机种的1个变更为2个),有效的设定频率也扩大到了0.5 Hz~300.0 Hz。 |  |
自动/手动 陷波滤波器
搭载简单的自动设定陷波滤波器的功能。不需进行繁琐的振动频率测定便可自动检测振动,并设定陷波滤波器。 通过该陷波滤波器,可大幅降低因机械设备产生的异音和振动,实现高速响应动作。 A6家族产品搭载了5个陷波滤波器。每个的设定频率为50 Hz~5000 Hz,且都可调整深度。(其中2个可自动设定) | 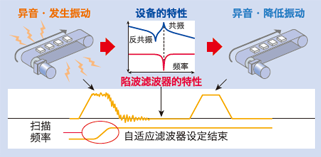 |
增益3段功能
除通常的增益切换外,追加了第3段增益切换功能。可在停止・运转时的增益中设定停止间隙时的增益。暂时提高停止间隙时的增益,可缩短定位时间并且降低振动。 | 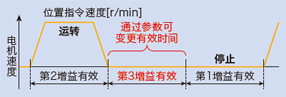 |
参数初始化功能
通过前面板或PC使参数恢复到出厂设置。 |
惯量比切换功能
可通过接口的切换输入功能切换第1/第2惯量比。可在
有/无负载等惯量有2段变化时,提高响应性。 |
输入输出信号分配功能
可通过参数任意分配通用的10个输入,6个输出信号。(输入信号都可进行常开,常闭的选择)。通过使用安装调试软件「PANATERM」,设定更加轻松。 |
转矩限制切换功能
可应用于简单的压力・张力控制,无传感器原点复位等事例中。 |
半闭环/全闭环(输入脉冲8 Mpps、输出脉冲 4 Mpps)对应
AA6SF系列可对应全闭环控制,实现指令输入8 Mpps,反馈输出4 Mpps的高分辨率、高速运转。可对应高性能定位分辨率指令(脉冲列指令的情况下)。 |  |
动态制动器功能
通过设定参数,在伺服使能OFF时,正方向/负方向驱动禁止时,电源断电时,异常停止时,可选择使伺服电机的U、V、W的卷线短路的动态制动器动作。 请根据机械设备的要求规格,选择设定动作时序。 |
电源突入电流抑制功能
接通电源时,为防止由于突入电流引起的电源配线用开关误动作,内置了突入电流抑制电阻。 |
再生处理功能
使较大惯量的负载停止时或上下轴驱动时,通过再生电阻消耗由伺服电机返回给伺服驱动器能量的功能。 |
安装了「PANATERM」的电脑与MINAS A6家族产品通过USB连接后,可轻松的进行参数的设定、控制状态的监视、安装的调试、机械设备的分析等。 「PANATERM」对应日语・英语・汉语3国语言。
| 系列 | 位置 控制 | Block 动作 | 速度 控制 | 内部 速度 指令 | 转矩 控制 | 全闭环 控制 | 脉冲 | 模拟 | Modbus | 外部 位移 传感器 | RS232 RS485 | 安全 连接器 | 电源电压 (V) | 出力 (W) | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 模拟/ 脉冲列 输入/ Modbus 通信 | 旋转 电机 | A6SE |  | | | | AC100/ AC200 | 50 ~ 2200 | ||||||||
| A6SG | | | | | | | AC100/ AC200 | 50 ~ 2200 | ||||||||
| A6SF | | | | | | | | | | | | | AC100 AC200 AC400 | 50 ~ 2200 | ||
基本规格
| 项目 | 功能 | |||
|---|---|---|---|---|
| 输入电源 | 100 V | 主电路电源 | 单相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | |
| 控制电路电源 | 单相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | |||
| 200 V | 主电路电源 | A型~ D型 | 单相/三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |
| E型~ H型 | 三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |||
| 控制电路电源 | A型~ D型 | 单相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | ||
| E型~ H型 | 单相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |||
| 使用环境条件 | 温度 | 使用温度 0 ℃~55 ℃(无冻结) 保存温度 -20 ℃~65 ℃(最高温度保证:80 ℃ 72小时 但是无结露※1) | ||
| 湿度 | 使用、保存时都需保持在20 %~85 % RH 以下 (无结露※1) | |||
| 海拔 | 海抜1000 m 以下 | |||
| 振动 | 5.88 m/s2 以下,10 Hz ~60 Hz | |||
| 控制方式 | IGBT PWM 方式 正弦波驱动 | |||
| 编码器反馈 | 23 bit(8388608 分辨率)7线串行绝对式编码器 ※使用增量式系统( 不使用多圈数据) 的情况下,使用时无需连接绝对式编码器用电池。将参数Pr0.15 设置为出厂设置“1”。 | |||
| 外部位移传感器反馈 | A/B 相·原点信号差分输入、串行通信 串行通信位移传感器对应制造商: Mitutoyo 、Heidenhain、Renishaw、Magnescale、Nidec-sankyo、Fagor Automation | |||
| I/O 连接器 | 控制信号 | 输入 | 通用输入10 个 根据参数选择通用输入功能 | |
| 输出 | 通用输出6 个 根据参数选择通用输出功能 | |||
| 模拟信号 | 输入 | 输入3个(16bitA/D输入1个、12bitA/D输入2个) | ||
| 输出 | 输出2个(模拟监视器输出2个) | |||
| 脉冲信号 | 输入 | 输入2个( 光电耦合器输入、长线接收器输入) 通过光电耦合器输入,可对应长线驱动器I/F·开路集电极I/F 通过长线接收器输入,可对应长线驱动器I/F | ||
| 输出 | 输出4 个( 长线驱动输出3 个、开路集电极输出1 个) 编码器反馈脉冲(A·B·Z 相) 或者外部位移传感器脉冲(EXA· EXB·EXZ 相) 通过长线驱动器输出 Z 相或者 EXZ 相脉冲也有开路集电极输出。 | |||
| 通信功能 | USB | 可连接电脑等进行参数设定以及状态监视等。 | ||
| RS232 | 可与上位控制器进行1 :1 通信。 | |||
| RS485 | 可与上位控制器进行1 :n 通信(Modbus 对应)。 | |||
| 安全功能 | 为对应功能安全的端子 | |||
| 前面板 | ①按键 5 个 ②LED 6 位 | |||
| 回生 | A 型, B 型, G 型,H 型:无内置再生电阻( 只可外置) C 型〜F 型:内置再生电阻( 可外置) | |||
| 动态制动器 | A 型〜G 型:内置 H 型:仅外置 | |||
| 控制模式 | ①位置控制 ②速度控制 ③转矩控制 ④位置/速度控制 ⑤位置/转矩控制 ⑥速度/转矩控制 ⑦全闭环控制 7 个模式通过参数进行切换 | |||
※1 请注意,温度降低时湿度上升,容易产生结露。
功能
| 项目 | 功能 | ||
|---|---|---|---|
| 控制输入 | ①伺服使能开启输入 ②报警清除输入 ③增益切换输入 ④正方向驱动禁止输入 ⑤负方向驱动禁止输入 ⑥强制报警输入 ⑦惯量比切换输入 | ||
| 控制输出 | ①伺服报警输出 ②伺服准备输出 ③外部制动器解除信号 ④速度到达输出 ⑤转矩限制中信号输出 ⑥零速检出信号 ⑦警告输出 ⑧报警清除属性输出 ⑨伺服使能开启状态输出 | ||
| 位置控制 | 控制输入 | ①偏差计数器清除 ②指令脉冲禁止输入 ③指令分倍频切换 ④制振控制切换> | |
| 控制输出 | ①定位完成 ②有无位置指令输出 | ||
| 脉冲 输入 | 最大指令脉冲频率 | 500 kpps(使用光电耦合器输入时) 8 Mpps(使用长线接收器输入、4 倍频时) | |
| 输入脉冲信号形态 | 差动输入。通过参数可进行选择。(①正方向/负方向 ②A相/B相 ③指令/方向) | ||
| 指令脉冲分倍频 (电子齿轮比设置) | 指令脉冲频率×电子齿轮比 作为位置指令输入进行处理。但是,请在电子齿轮比为1/1000 倍〜8000 倍的情况下使用。 作为位置指令输入进行处理。但是,请在电子齿轮比为1/1000 倍〜8000 倍的情况下使用。 | ||
| 平滑滤波器 | 针对指令输入,可选择一次延迟滤波器或者FIR 型滤波器。 | ||
| 模拟输入 | 转矩限制指令输入 | 可单独进行各方向的转矩限制。 | |
| 转矩前馈输入 | 可通过模拟电压输入转矩前馈。 | ||
| 2 自由度控制/ 制振控 | 可使用 | ||
| 负载变动抑制控制 | 可使用 | ||
| Block 动作 | 可选择Modbus(RS232、RS485) 或者I/O。 | ||
| 速度控制 | 控制输入 | ①内部指令速度选择 ②零速箝位 ③速度指令符号输入 ④控制模式切换 | |
| 控制输出 | ①速度一致输出 ②有无速度指令输出 | ||
| 模拟输入 | 速度指令输入 | 通过模拟电压可进行速度指令输入。 位移传感器设定及指令极性根据参数而定。(6 V/额定转速 标准出厂设置) | |
| 转矩限制指令输入 | 可单独进行各方向的转矩限制。 | ||
| 转矩前馈输入 | 可通过模拟电压输入转矩前馈。 | ||
| 内部速度指令 | 可根据控制输入切换8 档内部速度。 | ||
| 软启动/断电功能 | 0~10 s/1000 r/min 可单独设定加速、减速,也可设定S形加减速。 | ||
| 零速箝位 | 可通过速度锁定输入将速度锁定为0。 | ||
| 2自由度控制 | 可使用 | ||
| 转矩控制 | 控制输入 | ①零速箝位 ②转矩指令符号输入 ③控制模式切换 | |
| 控制输出 | ①速度一致输出 ②速度限制中输出 | ||
| 模拟输入 | 转矩指令输入 | 可通过模拟电压输入转矩指令。 位移传感器设定及指令极性根据参数而定。(3 V/额定转矩 标准出厂设定) | |
| 速度限制功能 | 可根据参数设定速度限制值。 | ||
| 全闭环 控制 | 控制输入 | ①偏差计数器清零 ②指令脉冲禁止输入 ③指令分倍频切换 ④制振控制切换 ⑤转矩限制切换 | |
| 控制输出 | ①定位完成 ②位置指令有无输出 | ||
| 脉冲 输入 | 最大指令脉冲频率 | 500 kpps(光电耦合器输入) 8 Mpps(使用器线接收器输入、4 倍频时) | |
| 输入脉冲列形态 | 差动输入。可根据参数进行选择。(①正/负 ② A相/B相 ③指令/方向) | ||
| 指令脉冲分倍频 (电子齿轮比的设置) | 指令脉冲频率×电子齿轮比作为位置指令输入进行处理。但是,请在电子齿轮比为1/1000 倍〜8000 倍的情况下使用。 | ||
| 平滑滤波器 | 针对指令输入,可选择一次延迟滤波器或者FIR 型滤波器。 | ||
| 模拟输入 | 转矩限制指令输入 | 可单独进行正/ 负方向的转矩限制。 | |
| 转矩前馈输入 | 可通过模拟电压输入转矩前馈。 | ||
| 外部位移传感器分倍频设置范围 | 1/40倍 ~ 1280倍 可在分子=1~223、分母=1~223 的范围中任意设定编码器反馈脉冲(分子) 与外部位移传感器脉冲(分母) 的比,请在以上范围内使用。 | ||
| 2自由度控制/ 制振控制 | 可使用 | ||
| 负载变动抑 | 可使用 | ||
| Block 动作 | 可选择Modbus(RS232、RS485) 或者I/O。 | ||
| 共通 | 自动调整 | 可根据来自上位的动作指令以及安装调试软件“PANATERM”的动作指令下的电机驱动状态,实时识别负载惯性并自动设置相应刚性的增益。 | |
| 反馈脉冲的分频功能 | 可任意设定脉冲数。(编码器反馈脉冲数为最大值) | ||
| 防护等级 | 硬件错误 | 过电压、电压不足、过速度、超载、过热、过电流、编码器异常等。 | |
| 软件错误 | 位置偏差过大、指令脉冲分频、EEPROM异常等。 | ||
| 报警数据跟踪功能 | 可浏览报警履历。 | ||
基本规格
| 项目 | 功能 | ||||
|---|---|---|---|---|---|
| 输入电源 | 100 V | 主电路电源 | 单相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | ||
| 控制电路电源 | 单相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | ||||
| 200 V | 主电路电源 | A型~D型 | 单相/三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | ||
| E型, F型 | 三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | ||||
| 控制电路电源 | A型~D型 | 单相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |||
| E型, F型 | 单相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | ||||
| 使用环境条件 | 温度 | 使用温度 0 ℃~55 ℃(无结露) 保存温度 -20 ℃~65 ℃(最高温度保证:80 ℃ 72小时 无结露※1) | |||
| 湿度 | 使用、保存时都需保持在20 %~85 % RH 以下(无结露※1) | ||||
| 海拔 | 海抜1000 m 以下 | ||||
| 振动 | 5.88 m/s2 以下,10 Hz ~60 Hz | ||||
| 控制方式 | IGBT PWM 方式 正弦波驱动 | ||||
| 编码器反馈脉冲 | 23 bit(8388608 分辨率)7线串行绝对式编码器 ※由于仅需对应增量式系统,使用时无需连接绝对式编码器用电池。将参数Pr0.15设置为“1”。 | ||||
| I/O连接器 | 控制信号 | 输入 | 通用输入10 个 根据参数选择通用输入功能 | ||
| 输出 | 通用输出6 个 根据参数选择通用输入功能 | ||||
| 模拟信号 | 输入 | 无 | |||
| 输出 | 输出2 个 (模拟监视器输出2 个) | ||||
| 脉冲信号 | 输入 | 输入2 个 (光电耦合器输入、线接收器输入) | |||
| 输出 | 输出4 个 (长线驱动输出3 个、集电极电路输出1 个) | ||||
| 通信功能 | USB | 与电脑等的连接 | |||
| RS232 | 1:1 通信 | ※RS232、RS485 不适用于A6 SE 系列。 | |||
| RS485 | 1:1 通信 (最大31 轴) | ||||
| 前面板 | ①按键 5 个 ②LED 6 位 | ||||
| 再生 | A 型, B 型:无内置再生电阻 (只有外置) C 型〜F 型:内置再生电阻 (可外置) | ||||
| 动态制动器 | A 型〜F 型:内置 | ||||
| 控制模式 | ①位置控制 ②内部速度控制 ③位置/内部速度控制 | ||||
※1 请注意,温度降低时湿度上升,容易产生结露。
功能
| 项目 | 功能 | ||
|---|---|---|---|
| 控制输入 | ①伺服使能开启输入 ②报警清除输入 ③增益切换输入 ④正方向驱动禁止输入 ⑤负方向驱动禁止输入 ⑥强制报警输入 ⑦惯量切换输入 | ||
| 控制输出 | ①伺服报警输出 ②伺服准备输出 ③外部制动器解除信号 ④速度到达输出 ⑤转矩限制中信号输出 ⑥零速检出信号 ⑦警告输出 ⑧报警清除属性输出 ⑨伺服使能开启状态输出 | ||
| 位置 控制 | 控制输入 | ①偏差计数器清除 ②指令脉冲禁止输入 ③指令分倍频切换 ④制振控制切换 ⑤转矩限制切换 ⑥制振模式切换 | |
| 控制输出 | ①定位完成 ②位置指令有无输出 | ||
| 脉冲 输入 | 最大指令脉冲频率 | 500 kpps (使用光电耦合器时) 8 Mpps (驱动长线接收器输入时) | |
| 输入脉冲信号形态 | 差动输入。根据参数可进行选择。(①正方向/负方向 ②A相/B相 ③指令/方向) | ||
| 指令脉冲分倍频 (电子齿轮比设置) | 指令脉冲频率×电子齿轮比作为位置指令输入进行处理。但是,请在电子齿轮比为1/1000 倍〜8000 倍的情况下使用。 | ||
| 平滑滤波器 | 针对指令输入,可选择一次延迟滤波器或者FIR 型滤波器。 | ||
| 制振控制 | 可使用 | ||
| 2自由度控制 | 可使用 | ||
| 负载变动抑制控制 | 可使用 | ||
| Block 动作 | 通过I/O 控制 | ||
| 内部速度控制 | 控制输入 | ①内部指令速度选择 ②零速锁定 ③速度指令符号输入 ④控制模式切换 | |
| 控制输出 | ①速度一致输出 ②有无速度指令输出 | ||
| 内部速度指令 | 根据控制输入可切换8 档内部速度。 | ||
| 软启动/断电功能 | 0~10 s/1000 r/min 可单独设定加速、减速,也可设定S形加减速。 | ||
| 零速锁定 | 速可通过速度锁定输入将速度锁定为0。 | ||
| 2自由度控制 | 可使用 | ||
| 共通 | 自动调整 | 可根据来自上位的动作指令以及安装调试软件“PANATERM”的动作指令下的电机驱动状态,实时识别负载惯性并自动设置相应刚性的增益。 | |
| 反馈脉冲的分频功能 | 任意设定脉冲数。(编码器的脉冲数为最大值) | ||
| 防护 等级 | 硬件错误 | 过电压、电压不足、过速度、超载、过热、过电流、编码器异常等。 | |
| 软件错误 | 位置偏差过大、指令脉冲分频、EEPROM异常等。 | ||
| 报警数据跟踪功能 | 可浏览报警履历。 | ||